Using PyTorch for GPU Computing
Last updated on 2026-06-02 | Edit this page
Overview
Questions
- “How can we create and manipulate PyTorch tensors on a GPU?”
- “How can we move data between NumPy, CPU tensors, and GPU tensors?”
- “Why can PyTorch be useful for general-purpose GPU computing?”
Objectives
- “Create PyTorch tensors and apply operations.”
- “Understand the
@torch.compiledecorator and its limitations.” - “Compare the performance of PyTorch against other solutions.”
Introduction to PyTorch
PyTorch, often referred to as just torch, is a popular open-source Python library commonly used for machine learning and AI. It provides many features for working with N-dimensional arrays (called tensors), automatic differentiation, neural networks, and GPU acceleration. PyTorch was originally developed by Meta and is now maintained by the PyTorch Foundation, which is part of the Linux Foundation.
You can read more about PyTorch here: https://pytorch.org/
PyTorch has many features related to AI and training neural networks. However, in this episode, we will focus on running general-purpose code on the GPU using tensors.
Getting started
First, we need to import torch:
Next, we can check whether PyTorch detects a GPU:
After this, we can create a device and print its name. The device
determines where PyTorch stores data and performs computations. In our
case, we will use cuda:0, which refers to the NVIDIA GPU
with index 0.
PYTHON
# Initialize the device
device = torch.device("cuda:0")
# Print the device name
name = torch.cuda.get_device_name(device)
print("GPU detected:", name)This shows the full name of the GPU. For example:
OUTPUT
GPU detected: NVIDIA A100-SXM4-40GB MIG 3g.20gbNext, we create a tensor. A tensor is similar to a NumPy array. We
can create a tensor using torch.tensor, and place it on the
GPU using device=device.
PYTHON
# Create a tensor on the GPU containing the numbers [1, 2, 3, 4]
x = torch.tensor([1.0, 2, 3, 4], device=device)
# Print the number of elements
print(x.numel())
# Print the data type of the elements
print(x.dtype)This should print 4 and torch.float32.
Notice that PyTorch’s default floating-point type is usually 32-bit,
while NumPy often defaults to 64-bit floating-point numbers. This is
useful on GPUs, where 32-bit operations are usually faster. You can
change the default floating-point dtype using
torch.set_default_dtype(torch.float64), which can be useful
when matching NumPy code.
Working with tensors
To convert a NumPy array into a PyTorch tensor, we can use
torch.from_numpy. Note that the resulting PyTorch tensor
will not copy the data; instead, it shares the same memory with the
NumPy array. This means that modifying the PyTorch tensor will also
change the contents of the original NumPy array.
To convert a tensor back into a NumPy array, we can use
tensor.cpu().numpy(). Since NumPy arrays always live in CPU
memory, CUDA tensors must first be copied back to the CPU using
.cpu().
PYTHON
import numpy as np
# Create NumPy array
a = np.array([5, 6, 7, 8])
# Convert NumPy -> PyTorch tensor (CPU)
b = torch.from_numpy(a)
# Copy CPU -> GPU
c = b.to(device)
# Copy GPU -> CPU
d = c.cpu()
# Convert back to NumPy array
e = d.numpy()
# They should be equal
print(np.all(a == e))This should print True, since the conversion from NumPy
to PyTorch and back is lossless.
There are also many ways to create a tensor directly on the GPU. Many are similar to functions in NumPy. These functions create the data directly in GPU memory, without copying it from the CPU. Here are some examples.
PYTHON
# Gives [0.0, 0.0, 0.0, 0.0, ...]
a = torch.zeros(10, device=device)
# Gives [1.0, 1.0, 1.0, 1.0, ...]
b = torch.ones(10, device=device)
# Gives [42.0, 42.0, 42.0, 42.0, ...]
c = torch.full((10,), 42.0, device=device)
# Gives [0.3226, 0.7758, 0.6456, ...]
d = torch.rand(10, device=device)
# Gives an uninitialized array
e = torch.empty(10, device=device)
# Gives [0, 1, 2, 3, 4, ...]
f = torch.arange(10, device=device)
# Gives [0.0000, 0.1111, 0.2222, 0.3333, ..., 1.0000]
g = torch.linspace(0, 1, 10, device=device)Tensors can be multi-dimensional. They can be 1-dimensional (vectors), 2-dimensional (matrices), 3-dimensional (cubes), and so on.
PYTHON
# This is a vector of length 3
x = torch.rand(3, device=device)
# This is a matrix of size 3x3
y = torch.rand((3, 3), device=device)
# This is a cube of size 3x3x3
z = torch.rand((3, 3, 3), device=device)Slicing is also supported, similar to NumPy. For example,
m[i, :] gives the \(i\)-th
row and m[:, j] gives the \(j\)-th column of a matrix m.
The result of slicing a tensor is again a tensor. Note that modifying
this slice will also modify the original tensor, as it is a view.
PYTHON
x = torch.rand(2, 3, device=device)
# Print the matrix
print("before:", x)
# Modify the first row
x[0, :] = 0
# Print the matrix
print("after:", x)OUTPUT
before: tensor([[0.9707, 0.2220, 0.9106], [0.2907, 0.4936, 0.1780]], device='cuda:0')
after: tensor([[0.0000, 0.0000, 0.0000], [0.2907, 0.4936, 0.1780]], device='cuda:0')Tensors also support many mathematical operations.
PYTHON
x = torch.ones(5, device=device)
y = torch.arange(5, device=device)
print("x+y:", x + y)
print("x-y:", x - y)
print("x*y:", x * y)
print("x/y:", x / y)
print("sqrt:", torch.sqrt(y))
print("exp:", torch.exp(y))
print("sin:", torch.sin(y))OUTPUT
x+y: tensor([1., 2., 3., 4., 5.], device='cuda:0')
x-y: tensor([ 1., 0., -1., -2., -3.], device='cuda:0')
x*y: tensor([0., 1., 2., 3., 4.], device='cuda:0')
x/y: tensor([ inf, 1.0000, 0.5000, 0.3333, 0.2500], device='cuda:0')
sqrt: tensor([0.0000, 1.0000, 1.4142, 1.7321, 2.0000], device='cuda:0')
exp: tensor([ 1.0000, 2.7183, 7.3891, 20.0855, 54.5982], device='cuda:0')
sin: tensor([ 0.0000, 0.8415, 0.9093, 0.1411, -0.7568], device='cuda:0')Be aware that you cannot mix NumPy arrays and GPU tensors in these
operations. To do this, you either need to use .cpu() to
convert your GPU tensor into a CPU tensor or, alternatively, copy your
NumPy array into a GPU tensor.
PYTHON
x = torch.rand(5, device=device)
y = np.arange(5)
# This is not allowed
try:
print(x + y)
except Exception as e:
print("error:", e)
# This returns a tensor on the CPU
print("CPU:", x.cpu() + y)
# This returns a tensor on the GPU
print("GPU:", x + torch.tensor(y, device=device))OUTPUT
error: can't convert cuda:0 device type tensor to numpy. Use Tensor.cpu() to copy the tensor to host memory first.
CPU: tensor([0.6511, 1.7587, 2.4972, 3.3509, 4.5963])
GPU: tensor([0.6511, 1.7587, 2.4972, 3.3509, 4.5963], device='cuda:0')Example Using N-Body Simulation
Now, we will consider a larger example of how to use PyTorch. For
this example, we consider n random planetary bodies and
calculate the total gravitational force that each body experiences from
the other bodies using Newton’s
law of universal gravitation.
First, we generate n random planets in a 2D plane. The
x and y coordinates are chosen randomly in the
range \([0, 1]\).
PYTHON
n = 10
position = torch.rand((2, n), device=device)
mass = torch.rand(n, device=device) + 100Let’s plot the positions of the planets.
PYTHON
%matplotlib inline
import matplotlib.pyplot as plt
plt.axis("equal")
plt.scatter(
position[0,:].cpu(),
position[1,:].cpu(),
s=mass.cpu()
)
plt.show()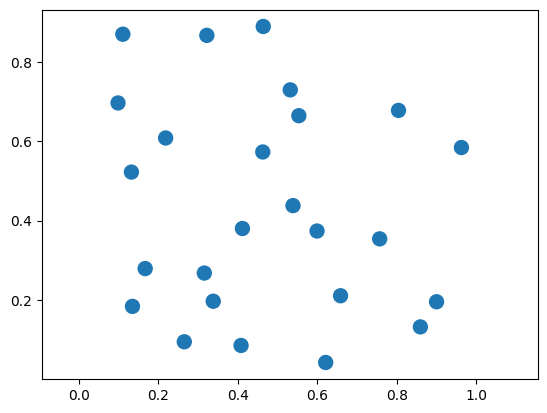
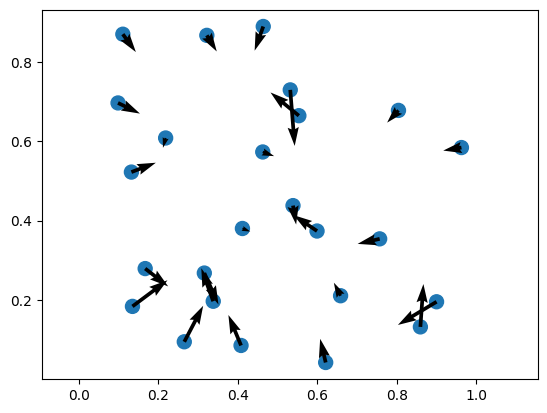
The force on planet \(i\) is given by the following equation:
\(\mathbf{F}_i = \sum_{j=1, j \neq i}^{N} G \frac{m_i m_j}{\|\mathbf{p}_j - \mathbf{p}_i\|^2} \left(\frac{\mathbf{p}_j - \mathbf{p}_i}{\|\mathbf{p}_j - \mathbf{p}_i\|}\right)\)
Now, we can define a function that computes these forces between the planets.
PYTHON
G = 6.67e-11
def calculate_forces(pos, mass):
# diff[:, i, j] = pos_j - pos_i
diff = pos[:, None, :] - pos[:, :, None] # (2, N, N)
# dist[i, j] = ||pos_j - pos_i||
dist = diff.norm(dim=0) # (N, N)
direction = diff / dist
# Force on i from j: F_ij = G * m_i * m_j * r_ij / |r_ij|^2
forces = G * mass[:, None] * mass[None, :] / dist**2
return (direction * forces[None, :, :]).nansum(dim=2) # (2, N)Finally, we can plot the results.
PYTHON
forces = calculate_forces(position, mass)
plt.axis("equal")
plt.scatter(
position[0,:].cpu(),
position[1,:].cpu(),
s=mass.cpu()
)
plt.quiver(
position[0,:].cpu(),
position[1,:].cpu(),
forces[0,:].cpu(),
forces[1,:].cpu()
)
Using torch.compile
An important feature introduced in PyTorch 2.0 is the @torch.compile
decorator. This decorator can be applied to a Python function and tells
PyTorch to compile the tensor operations inside the function into a more
optimized version before executing it. Instead of running the function
line by line in Python, PyTorch analyzes the operations inside the
function and builds a more efficient computation graph. It can then
apply various optimizations, such as fusing multiple operations
together, reducing memory usage, and generating more efficient GPU
kernels.
This process can significantly improve performance, especially for functions that perform many tensor operations. The compiled function can therefore run much faster than the original Python version while keeping the code easy to read and write.
Below is a simple example. We create two large tensors on the GPU and
define a function that performs several mathematical operations on them.
By adding the @torch.compile decorator, PyTorch will
attempt to optimize the function automatically.
PYTHON
@torch.compile
def compute(a, b):
return (a + b) + torch.sin(a) * torch.cos(b)
a = torch.rand(1_000_000, device=device)
b = torch.rand(1_000_000, device=device)
c = compute(a, b)
print("result:", c)This lets PyTorch optimize the compute function as a
whole and makes the code faster than running the operations separately.
It accomplishes this by tracing through your Python code and looking for
PyTorch operations.
For example, to see what PyTorch is doing internally, we can use
set_logs, which prints what happens under the hood.
This generates a large amount of output about the internals of PyTorch. You do not need to understand all the output. However, among this output is the following:
OUTPUT
...
[__graph_code] TRACED GRAPH
[__graph_code] ===== __compiled_fn_139_120d693e_cd49_4b9d_8ed2_fa7094feea70 =====
[__graph_code] /home/user/.local/lib/python3.13/site-packages/torch/fx/_lazy_graph_module.py class GraphModule(torch.nn.Module):
[__graph_code] def forward(self, L_a_: "f64[1000000][1]cuda:0", L_b_: "f64[1000000][1]cuda:0"):
[__graph_code] l_a_ = L_a_
[__graph_code] l_b_ = L_b_
[__graph_code] torch.sin(a) * torch.cos(b)
[__graph_code] add: "f64[1000000][1]cuda:0" = l_a_ + l_b_
[__graph_code] sin: "f64[1000000][1]cuda:0" = torch.sin(l_a_); l_a_ = None
[__graph_code] cos: "f64[1000000][1]cuda:0" = torch.cos(l_b_); l_b_ = None
[__graph_code] mul: "f64[1000000][1]cuda:0" = sin * cos; sin = cos = None
[__graph_code] add_1: "f64[1000000][1]cuda:0" = add + mul; add = mul = None
[__graph_code] return (add_1,)
...This part shows how PyTorch has traced our function
compute as a graph of operations.
OUTPUT
...
[__kernel_code] @triton.jit
[__kernel_code] def triton_poi_fused_add_cos_mul_sin_0(in_ptr0, in_ptr1, out_ptr0, xnumel, XBLOCK : tl.constexpr):
[__kernel_code] xnumel = 1000000
[__kernel_code] xoffset = tl.program_id(0) * XBLOCK
[__kernel_code] xindex = xoffset + tl.arange(0, XBLOCK)[:]
[__kernel_code] xmask = xindex < xnumel
[__kernel_code] x0 = xindex
[__kernel_code] tmp0 = tl.load(in_ptr0 + (x0), xmask)
[__kernel_code] tmp1 = tl.load(in_ptr1 + (x0), xmask)
[__kernel_code] tmp2 = tmp0 + tmp1
[__kernel_code] tmp3 = libdevice.sin(tmp0)
[__kernel_code] tmp4 = libdevice.cos(tmp1)
[__kernel_code] tmp5 = tmp3 * tmp4
[__kernel_code] tmp6 = tmp2 + tmp5
[__kernel_code] tl.store(out_ptr0 + (x0), tmp6, xmask)
...This part shows that PyTorch automatically generated a GPU
kernel named triton_poi_fused_add_cos_mul_sin_0
that performs all operations in one go, instead of having separate
functions for each operation. The generated kernel uses Triton, a
Python-based language and compiler for GPU programming.
There are certain limitations to @torch.compile. For
example, the inputs and outputs can only be PyTorch tensors, and you
must be careful with loops (for statements) and
conditionals (if statements). For more information, see the
guide
on the torch.compile programming model.
As an example, consider the following function that scales a tensor
by 2 if the sum is positive and -2 otherwise.
Note that we pass the fullgraph=True option to force
PyTorch to raise an error if it cannot compile.
PYTHON
import torch
@torch.compile(fullgraph=True)
def fail_example(x):
if x.sum() > 0:
return x * 2
else:
return x * -2
fail_example(torch.rand(100, device=device))This results in the following error:
OUTPUT
Unsupported: Data-dependent branching
Explanation: Detected data-dependent branching (e.g. `if my_tensor.sum() > 0:`). Dynamo does not support tracing dynamic control flow.
Hint: This graph break is fundamental - it is unlikely that Dynamo will ever be able to trace through your code. Consider finding a workaround.
Hint: Use `torch.cond` to express dynamic control flow.
Developer debug context: attempted to jump with TensorVariable()
For more details about this graph break, please visit: https://meta-pytorch.github.io/compile-graph-break-site/gb/gb0170.htmlThe problem here is that PyTorch cannot statically determine whether
to execute x * 2 or x * -2, as this is
dependent on the runtime value of x.sum().
Instead, for this example, we can use torch.where to
select between them instead of having an if statement.
Comparison of performance
Let’s measure the time of our calculate_forces function
with and without @torch.compile to compare the
performance.
First, we import %gpu_timeit from
cupyx.
Next, we call our function with 10,000 planets.
PYTHON
n = 10_000
pos = torch.rand(2, n, device=device)
mass = torch.rand(n, device=device)
%gpu_timeit -n50 calculate_forces(pos, mass)OUTPUT
run: CPU: 177.674 us +/- 9.926 (min: 171.843 / max: 241.492) us
GPU-0: 21880.586 us +/- 11.218 (min: 21849.089 / max: 21906.431) usThe execution time on the GPU is around 21.880 milliseconds.
We can use @torch.compile to speed things up! Note how
@torch.compile works recursively: if a function is
compiled, all called functions are also compiled.
PYTHON
n = 10_000
pos = torch.rand(2, n, device=device)
mass = torch.rand(n, device=device)
@torch.compile
def calculate_forces_fast(pos, mass):
return calculate_forces(pos, mass)
forces = calculate_forces_fast(pos, mass);
%gpu_timeit -n50 calculate_forces_fast(pos, mass)OUTPUT
run: CPU: 114.750 us +/- 23.757 (min: 106.006 / max: 277.980) us
GPU-0: 4008.182 us +/- 22.778 (min: 3997.696 / max: 4164.608) usThis time it takes around 4.008 milliseconds, a speedup of 5.5x over the original version!
As a comparison, we can also run the same function on the CPU using PyTorch:
PYTHON
n = 10_000
pos = torch.rand(2, n, device="cpu")
mass = torch.rand(n, device="cpu")
%gpu_timeit -n1 calculate_forces_fast(pos, mass)OUTPUT
run: CPU: 608562.989 us GPU-0: 608638.977 usThe CPU takes 608.563 milliseconds, meaning our GPU is around 152x faster than our CPU for this particular calculation!
Challenge
Measure the performance of calculate_forces_fast for
different numbers of planets. For example, n = 2500,
n = 5000, n = 10_000, and
n = 20_000. What timings do you expect? What do you
get?
The following times were measured (on your system they might be different!).
OUTPUT
421.274 us
1354.342 us
4965.478 us
18965.095 usThe results show that each time we double n, the
execution time quadruples. This happens as the number of pairwise
interactions between \(n\) planets
equals \(n^2\).
- “PyTorch tensors can be created and manipulated directly on the GPU”
- “Use
.to(device)to move data between CPU and GPU, and.cpu().numpy()to convert back to NumPy” - “The
@torch.compiledecorator can significantly speed up tensor operations by fusing them into optimized GPU kernels”