Loops
Last updated on 2026-07-21 | Edit this page
Overview
Questions
- “What are for and while loops?”
- “What is a comprehension?”
Objectives
Before starting to work in a new document, Melissa has to:
Activate her environment
Activating project at `~/projects/trebuchet`
Importing the package under its modified name
Defining the structures
JULIA
mutable struct Trebuchet <: AbstractVector{Float64}
counterweight::Float64
release_angle::Float64
end
struct Environment
wind::Float64
target_distance::Float64
end
Base.size(::Trebuchet) = tuple(2)
function Base.getindex(trebuchet::Trebuchet, i::Int)
if i === 1
return trebuchet.counterweight
elseif i === 2
return trebuchet.release_angle
else
error("Trebuchet only accepts indices 1 and 2, yours is $i")
end
end
function Base.setindex!(trebuchet::Trebuchet, v, i::Int)
if i === 1
trebuchet.counterweight = v
elseif i === 2
trebuchet.release_angle = v
else
error("Trebuchet only accepts indices 1 and 2, yours is $i")
end
end
function shoot_distance(trebuchet::Trebuchet, env::Environment)
shoot_distance(env.wind, trebuchet.release_angle, trebuchet.counterweight)
end
function shoot_distance(args...) # slurping
Trebuchets.shoot(args...)[2] # splatting
endOUTPUT
shoot_distance (generic function with 2 methods)Now Melissa knows how to shoot the virtual trebuchet and get the distance of the projectile, but in order to aim she needs to take a lot of trial shots in a row. She wants her trebuchet to only shoot a hundred meters.
She could execute the function several times on the REPL with different parameters, but that gets tiresome quickly. A better way to do this is to use loops.
Random search
The first thing that comes to her mind is to randomly sample points
of the parameter space of the trebuchet. The function
rand() will give her a random number between 0 and 1 that
is uniformly distributed. So
OUTPUT
2-element Trebuchet:
448.5938843845938
0.2297455909332035will give her a Trebuchet with a weight between 0 and 500 and a release angle between 0 and pi/2 radians at random.
Now she can store the results of 3 random trebuchets in an array like this
JULIA
env = Environment(5, 100)
distances = [shoot_distance(Trebuchet(rand() * 500, rand() * pi / 2), env) for _ in 1:3]OUTPUT
3-element Vector{Float64}:
80.70866172054447
50.606830597542285
61.70138200474863This is called an array comprehension. To get the information of the parameters and the results in one place she writes that again a bit differently
JULIA
N = 10
weights = [rand() * 500 for _ in 1:N]
angles = [rand() * pi/2 for _ in 1:N]
distances = [(w,a) => shoot_distance(Trebuchet(w, a), env) for (w, a) in zip(weights, angles)]OUTPUT
10-element Vector{Pair{Tuple{Float64, Float64}, Float64}}:
(153.4017186515968, 1.0811154247436097) => 75.94558183320551
(433.6997314801423, 0.30638412692836914) => 105.98867692249704
(24.341288453491817, 0.12045684966256007) => 18.75602651296803
(286.59688803082844, 1.5624213012247836) => 10.609444590528371
(475.11320237767416, 1.5195569254118224) => 17.196756160009514
(69.2095322645756, 0.9908974450309935) => 64.87063263481392
(361.6996105277568, 0.9820127582299857) => 98.44263127585704
(89.95302223685003, 0.7141199011203246) => 87.23616074780476
(157.03402647892034, 0.3670964278256715) => 96.94101188342367
(65.36615653283262, 0.8311997762049679) => 72.444986185825Gradient descent
That is working out so far, but Melissa wonders if she can improve her parameters more systematically.
Digression: Gradients
The shoot_distance function takes three input parameters
and returns one value (the distance). Whenever we change one of the
input parameters, we will get a different distance.
The gradient of a function gives the direction in which the return value will change when each input value changes.
Since the shoot_distance function has three input
parameters, the gradient of shoot_distance will return a
3-element Array: one direction for each input
parameter.
Thanks to automatic
differentiation and the Julia package ForwardDiff.jl
gradients can be calculated easily.
Melissa uses the gradient function of
ForwardDiff.jl to get the direction in which she needs to
change the parameters to make the largest difference.
Do you remember?
What does Melissa need to write into the REPL to install the package
ForwardDiff?
] install ForwardDiffadd ForwardDiff] add ForwardDiff.jl-
] add ForwardDiff
JULIA
using ForwardDiff: gradient
imprecise_trebuchet = Trebuchet(500.0, 0.25pi);
environment = Environment(5.0, 100.0);
grad = gradient(x ->(shoot_distance([environment.wind, x[2], x[1]])
- environment.target_distance),
imprecise_trebuchet)OUTPUT
2-element Vector{Float64}:
-0.12516519503998055
-49.443442438172205Melissa now changes her arguments a little bit in the direction of the gradient and checks the new distance.
JULIA
better_trebuchet = imprecise_trebuchet - 0.05 * grad;
shoot_distance([5, better_trebuchet[2], better_trebuchet[1]])OUTPUT
-2.785549535224487Great! That didn’t shoot past the target, but instead it landed a bit too short.
Experiment
How far can you change the parameters in the direction of the gradient, such that it still improves the distance?
JULIA
better_trebuchet = imprecise_trebuchet - 0.04 * grad
shoot_distance([environment.wind, better_trebuchet[2], better_trebuchet[1]])
120.48753521261001JULIA
better_trebuchet = imprecise_trebuchet - 0.03 * grad
shoot_distance([environment.wind, better_trebuchet[2], better_trebuchet[1]])
107.80646596787481JULIA
better_trebuchet = imprecise_trebuchet - 0.02 * grad
shoot_distance([environment.wind, better_trebuchet[2], better_trebuchet[1]])
33.90699307740854JULIA
better_trebuchet = imprecise_trebuchet - 0.025 * grad
shoot_distance([environment.wind, better_trebuchet[2], better_trebuchet[1]])
75.87613276409223Looks like the “best” trebuchet for a target 100 m away will be between 2.5% and 3% down the gradient from the imprecise trebuchet.
For loops
Now that Melissa knows it is going in the right direction she wants
to automate the additional iterations. She writes a new function
aim, that performs the application of the gradient
N times.
JULIA
function aim(trebuchet, environment; N = 5, η = 0.05)
better_trebuchet = copy(trebuchet)
for _ in 1:N
grad = gradient(x -> (shoot_distance([environment.wind, x[2], x[1]])
- environment.target_distance),
better_trebuchet)
better_trebuchet -= η * grad
end
return Trebuchet(better_trebuchet[1], better_trebuchet[2])
end
better_trebuchet = aim(imprecise_trebuchet, environment);
shoot_distance(environment.wind, better_trebuchet[2], better_trebuchet[1])OUTPUT
-2.2195176928658915Explore
Play around with different inputs of N and
η. How close can you come?
This is a highly non-linear system and thus very sensitive. The
distances across different values for the counterweight and the release
angle α look like this: 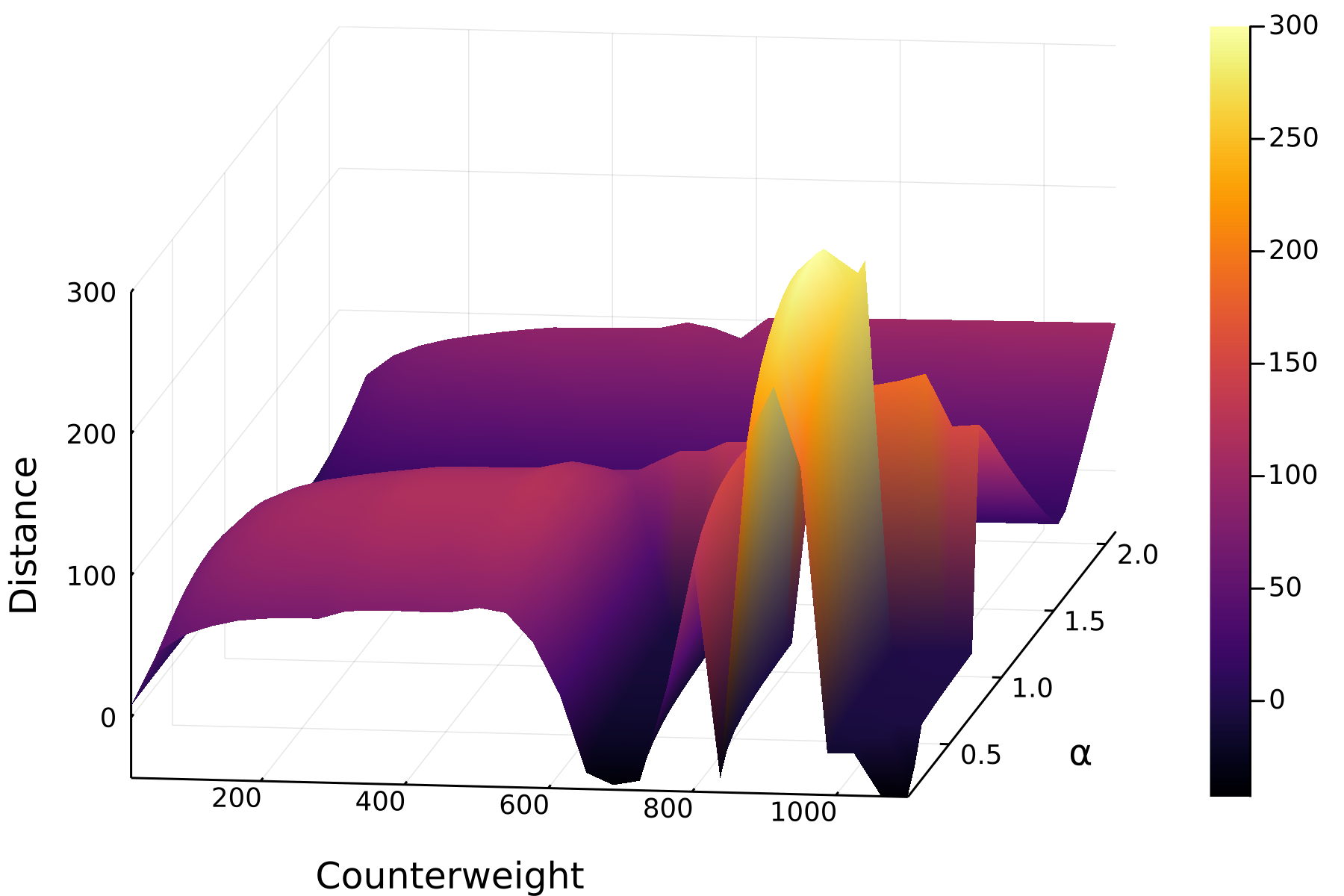
Aborting programs
If a call takes too long, you can abort it with
Ctrl-c
While loops
Melissa finds the output of the above aim function too
unpredictable to be useful. That’s why she decides to change it a bit.
This time she uses a while-loop to run the iterations until
she is sufficiently near her target.
(Hint: ε is
\epsilontab, and η is
\etatab.)
JULIA
function aim(trebuchet, environment; ε = 0.1, η = 0.05)
better_trebuchet = copy(trebuchet)
hit = x -> (shoot_distance([environment.wind, x[2], x[1]])
- environment.target_distance)
while abs(hit(better_trebuchet)) > ε
grad = gradient(hit, better_trebuchet)
better_trebuchet -= η * grad
end
return Trebuchet(better_trebuchet[1], better_trebuchet[2])
end
better_trebuchet = aim(imprecise_trebuchet, environment);
shoot_distance(better_trebuchet, environment)OUTPUT
100.05601729579894That is more what she had in mind. Your trebuchet may be tuned differently, but it should hit just as close as hers.
Keypoints
- “Use for loops for a known number of iterations and while loops for an unknown number of iterations.”